Дата публикации 25 марта 2026 | |
Источник
Морское Информационное Агентство |
ФГУП «Крыловский государственный научный центр» (серия статей раскрывающих тему робототехнических комплексов гражданского назначения в России и мире).
Часть вторая. Мировой опыт разработки и производства МРТК гражданского назначения, использующих безэкипажные катера в качестве МРТС.
Оценки объемов мировых рынков морских роботизированных комплексов (МРТК) и морских роботизированных средств (МРТС), входящих в них, в т.ч. безэкипажных катеров (англ. unmanned/uncrewed surface vehicles, USV), необитаемых подводных аппаратов (англ. unmanned underwater vehicles, UUV) и беспилотных летательных аппаратов (англ. unmanned aerial vehicles, UAV) в стоимостном выражении затруднены ввиду использования международными исследовательскими компаниями отличающихся методологических подходов, различия в которых связаны с двумя ключевыми факторами:
а) разницей в оценке объемов рынка с точки зрения включения в него МРТС двойного и военного назначения;
б) различиями в подходах по учету МРТС, в первую очередь безэкипажных судов, с точки зрения их размерений, в особенности крупнотоннажных судов (с высокой стоимостью), на которых установлены и применяются системы автономного судовождения (в частности, судов с длиной более 20 м);
в) для БПЛА – отсутствием выделенного сегмента БПЛА, используемых в морских робототехнических комплексах.
В связи с вышеизложенным, приведенные далее сведения о мировых объемах рынков МРТС в составе МРТК для целей настоящей НИР будут иметь целью не столько отразить конкретные оценки по объему и стоимости продаж МРТС, сколько продемонстрировать развитость мирового рынка МРТК и наличие спроса на все виды МРТС для применения в составе МРТК в гражданских целях, отразить масштаб деятельности по созданию разнородных робототехнических средств для решения различных целей и задач, а также описать ожидаемую динамику развития отрасли на среднесрочную перспективу (до 2030 г.).
В целом высокий спрос в мире на МРТК с различными МРТС в их составе (БЭК, НПА, БПЛА) и ожидаемые темпы динамики рынков обуславливается следующими факторами:
стремлением к сокращению вовлеченности человека и ростом автоматизации выполнения стратегических государственных, научных и коммерческо-практических задач, связанных с осуществлением морской деятельности;
ростом оборонных инвестиций в распределенные морские операции (финансирование со стороны Министерств обороны в странах, в первую очередь США и Европе) и модернизацию военно-морского флота с последующей интеграцией созданных технологий и решений в коммерческое использование;
расширением деятельности по разведке глубоководных месторождений нефти и газа на шельфе, расширением строительства и широким коммерческим внедрением оффшорной ветроэнергетики (стремлением энергетических компаний сократить расходы как на стадии проектирования, строительства объектов в открытом море, так и на стадии эксплуатации в части мероприятий по инспекциям инфраструктуры);
повышенной обеспокоенностью безопасностью подводной инфраструктуры;
ростом интеллектуализации и технологическим совершенствованием систем управления движением, систем навигации, систем ситуационной осведомленности МРТК и развитием технологий создания аккумуляторных батарей с увеличением емкости при сокращении удельных затрат на единицу мощности;
более широким коммерческим внедрением за счет расширения функциональности и роста осведомленности о преимуществах применения робототехнических средств по сравнению с традиционными методами решения задач;
обязательством по внедрению правил на основах принципов ESG, обязывающих проводить в том числе мониторинг окружающей среды;
повышением надежности систем и снижением цен на типовые датчики и процессоры, которые расширяют возможности применения МРТС в составе МРТК и их использование для решения все более широкого круга задач;
сокращением циклов поставок в условиях доступности высокосерийного оборудования для создания МРТС (системы связи, навигации, ключевые узлы и модули, аппараты и оборудование полезной нагрузки и т.д.);
простотой развертывания (транспортировка в контейнерах, минимальные требования к береговой инфраструктуре в месте развертывания).
В результате проведенного анализа мирового рынка МРТС типа БЭК можно выделить топ-10 мировых производителей в таблице 1.

Таблица 1. Топ-10 мировых производителей
Ширина продуктовой линейки не является определяющим признаком успешности производителя МРТС. Часть крупных игроков рынка, например, таких как Saildrone, Maritime Robotics, Xocean, Ocius, Kongsberg, Liquid Robotics, AutoNaut, не распыляют ресурсы на создание широких линеек, ограничиваясь 1-3 моделями/платформами, при этом концентрируют собственные ресурсы на создании качественного много функционального универсального модульного продукта с широкими возможностями настройки и адаптации под сценарии применения (различные функциональные задачи, районы и условия эксплуатации).
Анализ сфер применения (назначений) МРТС типа БЭК, описываемых в мировой практике, показал, что одни и те же измерения (собираемые данные) могут использоваться различными потребителями и/или для решения разнородных целей и задач, что приводит к определенной диффузии между сферами применения и невозможности их четкого разграничения по какому-либо одному признаку. Так, например, данные о физико-химических свойствах воды (температуре, солености, кислотности и т.д.) или о метеообстановке собираются и применяются в гидрографических, океанологических, метеорологических, экологических, научных исследованиях, для целей информационного обеспечения безопасного судоходства и т.д.; проведение батиметрических исследований и построение карт морского дна позволяет решать как научные задачи гидрографии и океанографии, так и коммерческие, связанные с разведкой ресурсов (полезных ископаемых), оффшорной энергетикой, инспекцией инфраструктуры.
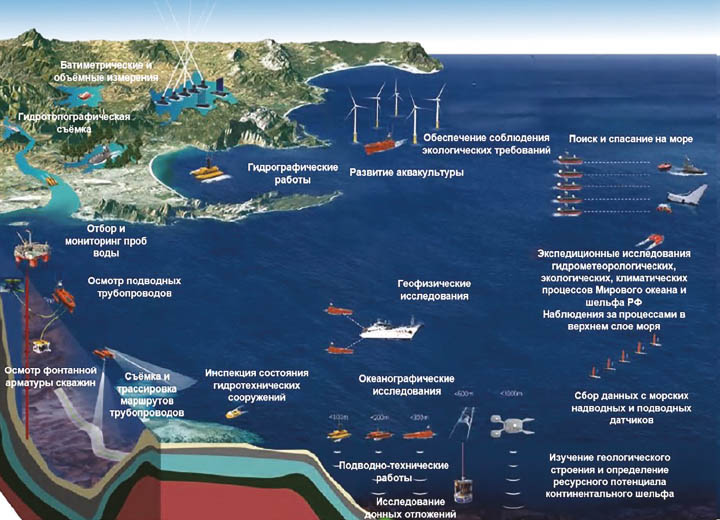
Одновременно, анализ каталогов, существующих МРТС типа БЭК и фактов их применения на практике для решения различных типов задач показал, что одна и та же модель МРТС с учетом оборудования в составе полезной нагрузки может быть использована в нескольких сферах применения, поскольку за счет установленного оборудования позволяет получить данные, применяемые в различных сферах. На рисунке 1 представлены различные сферы и сценарии применения МРТС типа БЭК, выявленные по результатам анализа зарубежного опыта разработки и эксплуатации.
К числу основных сфер применения (назначений) МРТС типа БЭК в составе МРТК в мировой практике относят:
а) Проведение гидрографических и океанографических исследований
б) Метеорологический мониторинг
в) Экологический мониторинг (мониторинг окружающей среды)
г) Ликвидация загрязнений
д) Инспекция и мониторинг морской инфраструктуры
е) Офшорная энергетика (строительство объектов ветроэнергетики, объектов по добыче нефти и газа)
ж) Рыбное хозяйство и аквакультура
з) Патрулирование и охрана морских акваторий, пресечение противоправной деятельности
и) Поисково-спасательные работы
к) Транспорт и логистика
л) Сбор данных, связь и ретрансляция
м) Научные экспедиции и образование
н) Прочие сферы применения
Тенденции мирового рынка МРТК гражданского назначения, использующих безэкипажные катера в качестве МРТС.
Анализ мирового рынка МРТК с МРТС типа БЭК показал, что зарубежный рынок продолжает активный рост и технологическую трансформацию при уже достигнутой высокой стадии развития (10-15 лет активной коммерческой эксплуатации МРТК с МРТС типа БЭК, наличие массового спроса со стороны ключевых потребителей и отвечающего их запросам предложения со стороны производителей, в т.ч. быстрая адаптация имеющихся платформенных решений и/или оперативный вывод на рынок новых продуктов).

Рисунок 1. Сферы и сценарии применения МРТС типа БЭК в мировой практике
Развитие автономных и беспилотных робототехнических комплексов (средств) для применения в морской среде стимулируется ростом потребностей в мониторинге и защите морских акваторий, добыче природных ресурсов на шельфе, обслуживании подводной инфраструктуры, а также в экологических, гидрометереологических и научных исследованиях при одновременном повышении экономической эффективности и безопасности морских операций. Ведущие страны, такие как США, Китай, Норвегия, Япония, Южная Корея и государства ЕС, активно инвестируют в разработку морских автономных систем, создают испытательные полигоны.
Тенденции мирового рынка МРТК гражданского назначения были разделены на три группы: технологические, рыночные и регуляторные.
Технологические тенденции и тренды
а) Рост интеллектуализации и технологическое совершенствование систем управления движением, систем навигации, систем ситуационной осведомленности. Тенденция к «интеллектуализации» МРТС типа БЭК проявляется в переходе от разрозненных датчиков к архитектурам слияния данных, где радары, лидары, камеры, гидроакустические приборы формируют единую модель окружения и повышает ситуационную осведомленность для автономной навигации, избежания столкновений, маневрирования и уклонения от препятствий, что позволяет расширить функциональные возможности МРТК, уменьшить зависимость от постоянного контроля со стороны оператора и обеспечить автономность плавания в сложных условиях.
б) Рост вычислительных мощностей МРТК, обуславливающий как увеличение возможностей автономного плавания, так и расширенные возможности для выполнения задач, включая обработку получаемых данных (данных ситуационной осведомленности и непосредственно исследуемых параметров). Это дает возможность автоматизировать сложные и опасные задачи, делая их выполнение безопаснее, быстрее и эффективнее.
в) Массовая доступность для гражданского сектора дешевых и постоянно совершенствующихся сенсоров различного типа (LiDAR, радары, тепловизионные и HD-камеры и др.), что позволяет повысить ситуационную осведомленность БЭК и расширить возможности их эксплуатации для более широкого типа задач, в том числе для проведения загоризонтных операций, с получением данных в режиме реального времени. Кроме того, широкая номенклатура доступных и относительно недорогих датчиков и сенсоров позволяет сократить цикл разработки МРТК (от стадии концепции до серийного изделия).
г) Повсеместная (кроме РФ) техническая и финансовая доступность спутниковой связи для организации связи с МРТК (Starlink, OneWeb, китайские перспективные Guowang и Qianfan). Оснащение МРТС модулями высокоскоростной спутниковой связи с низкими затратами на эксплуатацию и терминалами с низкой энергоемкостью повышает автономность плавания, поскольку дает возможность управлять БЭК в любом месте и на любом расстоянии в онлайн режиме, а также в режиме реального времени получать данные и информацию, собираемую при помощи МРТС.
д) Омниканальность радио- и спутниковой связи для управления МРТК в прибрежных акваториях (5G/4G/Wi-Fi/УКВ-каналы/ГНСС/Iridium/Starlink). Омниканальный подход позволяет выстроить взаимодействие, при котором МРТК получит доступ к существующим информационным системам и сетям независимо от местоположения.
е) Расширение состава применяемых МРТК за счет работы МРТС типа БЭК в режиме групп (роем), а также совместно с МРТС иных типов (ТНПА, АНПА, БПЛА). При этом МРТС типа БЭК может как выступать основным МРТС в составе МРТК, с помощью которого выполняется миссия, а другие МРТС дополняют и расширяют его возможности, так и являться, например, средством доставки к месту проведения исследований других МРТС (например, АНПА) и служить для уточнения позиционирования подводных аппаратов.
ж) Усиление требований экологического законодательства (конвенция MARPOL и др.) и отдельные недостатки традиционных ДВС (шум и вибрация, снижающие качество отдельных видов измерений, а также ограничение автономности плавания и дальности хода объемами топливных баков) способствовали широкому использованию электрических и гибридных силовых установок для МРТС типа БЭК различного назначения, а также использованию возобновляемых источников энергии для обеспечения движения БЭК (солнце, волна, ветер) и альтернативных видов топлива (H₂ и биодизель). Для этого разрабатываются модели МРТС типа БЭК с солнечными батареями (фотоэлектрическими ячейками), глайдеры и/или модели с подводным крылом, модели с жестким крылом-парусом и т.д.
з) Рост автономности плавания за счет развития технологий создания аккумуляторных батарей для электродвигателей и увеличения их емкости при одновременном снижение удельной стоимости на кВт*ч. Примерами развития технологий создания аккумуляторов являются:
разработка твердотельных аккумуляторов (процесс создания батарей, в которых для передачи электрического заряда используется твёрдый электролит вместо жидкого или гелевого, что делает такие батареи безопаснее и устойчивее к высоким температурам). Массовое производство твердотельных батарей пока ограничено из-за высокой стоимости и сложных технологий производства;
внедрение натрий-ионных аккумуляторов, где используется более доступный и дешёвый натрий вместо лития, что привлекает экологичностью и низкой стоимостью и т.д.;
рост доступности и снижение стоимости аккумуляторов на основе катодных составов с высокой удельной энергией (NMC /NCA , LFP ), позволяющих обеспечить большую автономность и др.
и) Платформенный подход и модульность конструкции БЭК при формировании модельных рядов производителей. В мировой практике каждый производитель не проектирует МРТС целиком самостоятельно (от корпуса до приборов и датчиков полезной нагрузки и программного обеспечения, интегрирующего взаимодействие и работу всех систем). Проектирование и производство отдельных блоков, элементов и модулей (корпус-носитель, элементы движительного комплекса, датчики и сенсоры полезной нагрузки и т.д.) осуществляется раздельно, в результате отдельная модель МРТС объединяет в себе решения от различных поставщиков. Модульность МРТС обеспечивает быструю смену конфигураций (полезной нагрузки) для решения различных типов задач. Так, например, модульная базовая платформа Lightfish (производитель Seasats) имеет модификации (см. Рисунок 2), получаемые за счет адаптации полезной нагрузки к решению разных типов задач (гидрография, исследование окружающей среды и экологический мониторинг, патрулирование и безопасность).
В связи с возрастающей ролью и значимостью применения МРТК (и формированием спроса на начальной стадии жизненного цикла морских робототехнических комплексов в РФ) в различных видах морской деятельности все более актуальным становится вопрос классификации МРТК, в том числе и по их моделям применения.
По оценкам экспертов ГК «Маринэк» морские беспилотные технологии находят применение в самых разных областях морской деятельности:
Собираются данные о температуре, солености, течениях, химическом составе воды и морской жизни. Это позволяет ученым лучше понимать климатические изменения, экологические процессы и морские экосистемы.
Осуществляется осмотр подводных трубопроводов и оборудования. Проводится картографирование морского дна и поиска месторождений нефти и газа.
В том числе, применяются для разведки, обнаружения мин, патрулирования побережья, борьбы с пиратством и подводной обороны.
Собираются данные о загрязнении воды, проводится мониторинг состояния коралловых рифов, осуществляется помощь в борьбе с разливами нефти.
Могут использоваться для поиска пропавших людей и судов, а также для оказания помощи в чрезвычайных ситуациях.
Могут собирать данные о численности рыбы, мониторить состояние рыболовных промыслов и оптимизировать процессы рыболовства.
Могут использоваться для осмотра, ремонта и обслуживания подводных кабелей, трубопроводов, портовых сооружений и ветряных электростанций.
В перспективе, могут использоваться для автоматизации грузоперевозок, снижения затрат и повышения эффективности [25].
В 2018 году Минпромторг России разработал единый открытый каталог «Морская робототехника. Состояние, проблемы, пути развития» с целью информационного обеспечения и координации работ по морской робототехнике [26]. В презентации данного каталога, в частности указывалось, что наиболее перспективными областями применения МРТК являются:
проектно-изыскательские работы при укладке трубопроводов или освоении подводных месторождений;
очистка дна от потенциально опасных объектов;
обследование трассы подводных трубопроводов;
обеспечение безопасности акваторий морских и прибрежных объектов;
экологический мониторинг;
ликвидация последствий аварийных ситуаций.
Однако несмотря на повышенное внимание органов российской власти к данной теме и ее актуальность в контексте автоматизации и роботизации видов морской деятельности в настоящий момент в российских национальных стандартах не приводится классификация МРТК (а также БЭК) по их назначению (т.е. по определяющему признаку классификации моделей применения МРТК). Классификация по назначению приводится только в отношении аппаратов необитаемых подводных (как одного из видов МРТС).

Рисунок 2. Вариативность моделей БЭК на основе базовой платформы Lightfish компании Seasats с учетом смены полезной нагрузки
К действующим российским национальным стандартам, определяющим классификацию МРТК и МРТС, следует отнести:
ГОСТ Р 60.7.0.1-2020 «Роботы и робототехнические устройства. Робототехнические комплексы морского назначения. Классификация» [27]. Базовый стандарт для МРТК. Задает базовые классификационные признаки и характеристики, определяет состав МРТК, а также примеры отличительных признаков и характеристик МРТС.
ГОСТ Р 60.7.0.3-2023 «Роботы и робототехнические устройства. Аппараты необитаемые подводные. Классификация» [28]. Данный стандарт устанавливает классификацию необитаемых подводных аппаратов, в том числе и по их назначению.
ГОСТ Р 60.7.0.2-2022 «Роботы и робототехнические устройства. Комплекс телеуправляемого необитаемого подводного аппарата рабочего класса. Основные требования» [29]. Стандарт определяет основные требования к аппаратам данного типа, а также типовые задачи, выполняемые телеуправляемыми необитаемыми подводными аппаратами.
Согласно ГОСТ Р 60.7.0.1-2020 [27] основным классификационным признаком МРТК является тип исполнения:
а) Стационарные МРТК, основной характеристикой которого является интеграция комплекса с морской техникой, на которой он размещен.
б) Мобильные МРТК, основной характеристикой которого является возможность эксплуатации, в том числе входящих в него МРТС, независимо от места размещения комплекса. Конструктивно мобильные МРТК могут быть выполнены, например, в контейнерном или модульном исполнении, приспособленные для перевозки и установки как на морских объектах, так и на берегу.
ГОСТ Р 60.7.0.1-2020 дает определение МРТК как робототехнический комплекс, состоящий из одного или нескольких МРТС и специального оборудования, обеспечивающего их применение по назначению, объединенных общим конструктивным решением для выполнения заданий в морской среде. Под МРТС понимается техническое средство, обладающее свойствами морского робота, способное выполнять поставленное задание по назначению автономно или под дистанционным управлением, или в сочетании указанных способов управления. К МРТС относятся: безэкипажное судно, необитаемый подводный аппарат, морской беспилотный летательный аппарат.
ГОСТ Р 60.7.0.1-2020 также классифицирует МРТК в зависимости от состава:
МРТК, в состав которых входят МРТС одного типа (например, только автономные необитаемые подводные аппараты (АНПА));
МРТК, в состав которых входят МРТС различных типов (например, АНПА и телеуправляемые необитаемые подводные аппараты (ТНПА)) [27].
Согласно ГОСТ 60.7.0.1-2020 при определении конфигурации конкретных МРТК могут быть учтены отличительные признаки и характеристики различных типов МРТС, которые включены в состав комплекса, среди которых выделяются (Приложение А к ГОСТ):
среда применения: надводные, подводные, надводно-подводные, воздушные;
способ управления: автономные, полуавтономные. дистанционно-управляемые;
принцип движения: с механическим приводом, с использованием физических свойств среды;
масса: легкие, средние, тяжелые;
радиус действия: ближнего, среднего, дальнего действия;
назначение;
тип источника энергии и тому подобное [27].
При этом в ГОСТ 60.7.0.1-2020 не приводится сама классификация МРТК по назначению.
В ГОСТ Р 60.7.0.3-2023 в отношении необитаемых подводных аппаратов (НПА) приводится следующая классификация по их назначению:
исследовательские – предназначенные для изучения водной среды и сбора различных данных, в том числе подводной геологоразведки;
поисковые – предназначенные для поиска и идентификации подводных объектов;
осмотровые (обследовательские), предназначенные для мониторинга состояния подводных технических объектов;
рабочие – предназначенные для выполнения различных подводных работ;
транспортные – предназначенные для перемещения в морской среде физических объектов;
универсальные (многоцелевые), с заменяемой полезной нагрузкой, как правило модульные по типу конструкции.
Для рабочего класса НПА есть свой ГОСТ Р 60.7.0.2-2022, в котором помимо основных требований (назначение и состав оборудования, основные характеристики оборудования, требования к эксплуатации, требования к безопасности и живучести и т. д.) к проектированию комплекса телеуправляемого необитаемого подводного аппарата приводится список типовых задач, которые могут выполняться таким комплексом:
проведение инженерных изысканий;
подключение гидравлических и электрических линий оборудования;
позиционирование и ориентирование монтируемых элементов оборудования
монтаж и активация вакуумных свай;
стыковка и подключение трубопроводов и шлангокабелей;
монтаж электрических и гидравлических перемычек;
такелажные работы;
поиск и обследование подводных объектов;
видеоконтроль подводных операций;
удаление ила, песка, отложений;
подготовка поверхности объектов к выполнению неразрушающего контроля и ремонта: очистка объектов от биообрастаний, следов коррозии и защитных покрытий;
закачка химреагентов в оборудование с целью борьбы с коррозией и гидратообразованием;
управление подводным оборудованием: активация гидравлических и механических исполнительных механизмов запорно-регулирующей арматуры, систем соединения, инструмента;
демонтаж элементов оборудования, трубопроводов, кабелей, шлангокабелей, тросов и других объектов, в том числе аварийные работы с применением гидравлического инструмента;
комплексно техническое обследование линейных объектов с одновременным применением нескольких видов оборудования (например, видеокамеры, гидролокатор бокового обзора, много лучевой эхолот);
перемещение грузов под водой [29].
Как показал анализ, в настоящее время в российских национальных стандартах нет единой системной классификации МРТК и МРТС по областям применения, которая определяла бы модели применения, а также типовые задачи и требования для всех видов МРТС.
Структура общих функциональных и технических требований к основным и критически важным составным частям БЭК (модулям, узлам, агрегатам, функциональным подсистемам) с учетом их унификации.
Целью разработки структуры общих функциональных требований является обеспечение сквозной логической связности операционно-прикладных задач, формируемых в обобщенных моделях применения МРТК, с требованиями к выполнению заданных функций с помощью МРТК и входящих в него МРТС, целевой нагрузки, обеспечивающей нагрузки, с техническими требованиями к составным частям МРТС (основным и критически важным составным частям). То есть реализуется увязка функции МРТК и требований к ее выполнению (что система должна выполнять для получения конечного результата для потребителя) с тем, как система должна быть устроена и как она будет реализовывать функцию.
Под функциональными требованиями в НИР понимаются свойства, характеристики, процессы, условия эксплуатации, ограничения и исключения, определяющие требования со стороны заказчика к процессу эксплуатации МРТК, МРТС (БЭК, НПА, БПЛА), целевой (полезной) нагрузке, обеспечивающей применение МРТК по назначению, и далее к отдельным составным частям МРТС (обеспечивающей нагрузке). Данное определение было сформулировано с учетом системы действующей нормативно-технической документации.
Продолжение статьи в следующем номере